Recently I came across a novel way to get the ADALM Pluto to generate a 10GHz signal. Jay Francis presented a minimal ADALM Pluto 10GHz transceiver system that used a commercial LNB and some Mini-Circuits high pass filters, to pick off the 3rd harmonic from the TX output. You can watch his video below.
This got me thinking, could you actually build a 10GHz transceiver from the ADALM Pluto like the 23cm Pluto Charon kit I’ve been working on ?
Now I don’t have any of the Mini-Circuits high pass filters and they were a little expensive to get shipped to Australia, but I did know of a 10GHz Frequency Multiplier kit from Minikits being manufactured locally. The Minikits kit comes with a GAL-39, 10GHz pipe cap filter and a NLB310 post amplifier that can be assembled on a universal microwave board. Whilst designed to double a 4-5GHz signal up on to 10GHz, it can also triple a 3-4GHz signal with a bit of tweaking and fine tuning. This was perfect for what I was planning with the ADALM Pluto, so one was ordered and I had to wait for the postman for it to arrive.
While the Minikits multiplier was on its way I also stumbled across N1BUG’sYouTube channel, where he walks you through how he assembles 10GHz pipe cap filters in his workshop. It was quite clear that some “real” heat is required, so I also purchased a Chinese made hotplate to assist with additional heat when soldering the cap itself. You can find more about that adventure here.. So far I’d spent less than the cost of two Mini-Circuits high pass filters.
I’m now sure that 10GHz pipe cap filters look bigger on the computer screen than they do in real life. I was genuinely surprised just how tiny they were. I was also questioning the purchase of a hotplate.
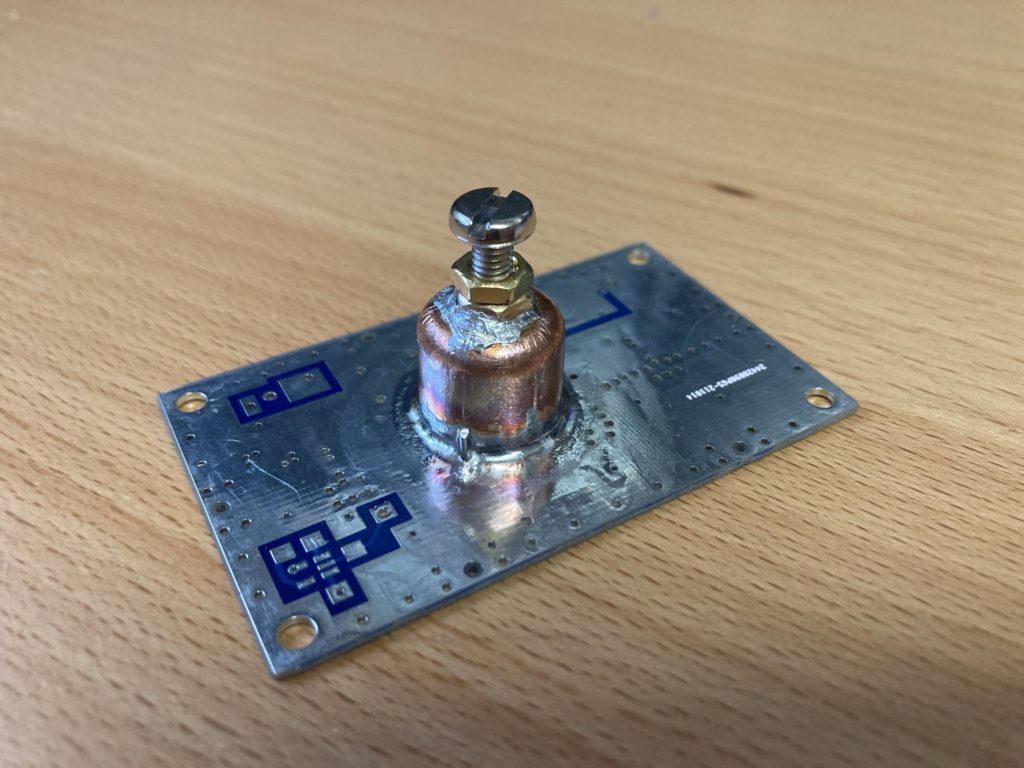
Following the Minikits multiplier kit instructions, I first drilled and tapped a M4 hole in the pipe cap, prepared the probes, modified the board to accept the pipe-cap and then proceeded to solder it down. Since I was using a hotplate, I decided to solder the pipe-cap down first, then solder the probes in after as suggested by N1BUG. This meant I needed to pay attention to the probe straightness and length, so that they would land in the right place once assembled. I was OK with this as I can see the probes through the M4 nut in the top using my microscope before and after soldering.
Now soldering this pipe-cap was genuinely difficult and the hotplate certainly made the job much easier. The flux that I used was not that great, I must try to find some of the really gooey sticky flux that N1BUG was using. However I persevered with my Hakko 50W iron wound up to +450°C with a K-tip and some 0.7mm solder rings, tacking and working my way around the cap. Once I’d placed sufficient solder, I then broke out the hot-air gun set to +400°C and re-flowed the joint, which gave me a much neater and more uniform appearance.
Below is the board after soldering and once I’d cleaned up the excess flux. The Minikits PCB has quite a few holes in the plane, so I used compressed PCBA flux cleaner blown in through the nut to make sure no residual flux was present after soldering. Likewise a small file and knife were used to clean up the blobs of solder around the nut.
For my first attempt at soldering pipe-cap filters I’m happy with the result. I found the hardest part soldering the nut to the top, mainly due to difficulties applying flux and getting the solder to wick to the nut and cap evenly.
So the next steps are to insert the probes and build the associated amplifiers and then test and tune. More to come.
Soldering anything with a large thermal mass is tricky business. Often when faced with this situation I crank up the temperature on my Hakko soldering station well into the +450°C region, wet the tip with solder and try to pour enough heat into the joint to get the solder to bond well. The downside is often the heat is drawn away from the joint, which means you’re heating the joint for far too long and materials start to burn. PCB laminate is typically OK to temperatures of 140-170°C for short periods before they turn brown. Likewise any flux does not get a chance to remove oxidisation and results in contaminated joints.
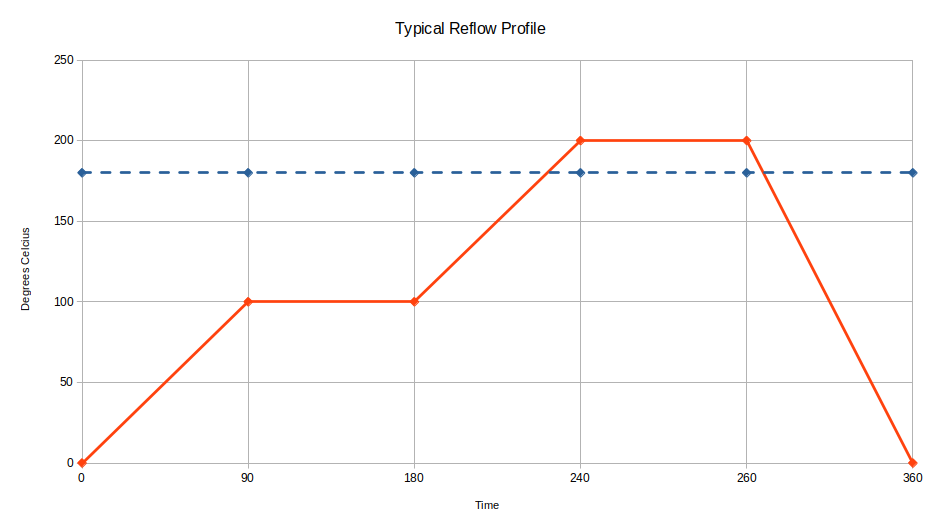
The best solution is to use a hot plate, which will bring what you’re trying to solder to a per-heated stage before you apply the iron. This is effectively a “manual” version of reflow soldering, I’ve tried to draw a typical reflow profile below.
There is a lot of information about the above curve on the internet, needless to say I intend to use the hot plate to give me the preheat and dwell time to activate any flux (first flat part), and then use my soldering iron to melt the solder (peak) and then allow things to cool down.
So the next question is where do you buy one ?
Searching in various places I noticed that online there was a plethora of some cheap Chinese hot plates for what seemed like very little money. I couldn’t build one for the price being offered. Wondering what was inside I found the following tear-down video, which suggests while they work there are some potential issues with their electrical safety.
Curious I ordered one and waited for the postman to deliver. Like the author above I found that the internal wiring of this unit was non-compliant to Australian safety standards, which shouldn’t come as a surprise as the unit had no safety markings at all; making these units technically illegal to import and use.
However I’m fortunate to work within the Electrical Industry, so I have access to the relevant safety standards and could modify my unit to make it compliant and therefore safe. Before anyone asks, no I cannot provide details of what I did to my unit. There are more things to consider than just the earthing, as was done in the above video. It took me quite a number of hours to fix the issues I found with this unit. I would suggest that others look for and buy hot plates that have the necessary RCM/UL/CE markings relevant to your country.
With the safety issues resolved I could set to testing the operation of my unit to see if it indeed worked. I placed a K-Type thermocouple into my trusty multimeter and set too testing various temperature settings with various materials.
PCB LaminateCopper Block
With the thermocouple sitting on the middle of the plate, the 7-segment set temperature and temp reading on the multimeter were close enough for government work. In case you were wondering +100°C is hot, so best not to touch the plate or attempt to pick up the items left on the plate for any period of time, ouch it will burn.
I do like the fact the hotplate on this unit is small, with a fiberglass surround. The fiberglass surround allows me to place my hands either side of the hotplate, without fear of being burnt. It also means I can use mechanical weights to hold things down as I solder them to various places. Hence why I could use a ball of blue-tac to hold the thermocouple wire.
On the 7-segment display the right most decimal point will flash as the heater element is switched on and off. Watching the hotplate warm-up and the 7-segment display decimal point, it would appear that some form of pulse integral control loop is being used with its own internal temp sensor. The plate warms reasonably quickly but will slow down as it approaches the set point, there was no signs of overshoot which I was happy with.
Once the main hot plate temperature was stable, I placed an old piece of PCB laminate under the temp sensor and watched the temperature on the thermocouple slowly increase. Needless to say after a couple of minutes the temperatures once again were close enough. I did adjust the set point up to +110°C as there is some noticeable thermal resistance across FR4 laminate. Likewise the copper block took a little longer at 5-6 minutes to warm up to temp, again I had to increase the set point to +120°C as copper is very good at dissipating heat, so this was of little surprise. All in all the thermal performance of this unit was good.
This hot plate should have at face value represented a real bargain, had it not been for the internal wiring and safety issues. I cannot stress how important electrical safety is, mains voltages are lethal; so please consider purchasing another unit that has the relevant safety marks.
So it’s been a while since I’d looked at my ADLAM Pluto SDR project, to complicate matters I’ve also recently switched to Linux. So it was time to see if I could find new SDR software to drive it.
After a few false starts and some trials and tribulations, I finally settled on SDRangel. I’ve used this app before to demodulate a High Altitude Balloon payload that transmitted a quirky DVB-T modulator using a RTL-SDR and Ubuntu Laptop.
So the only problem, SDRangel is written to natively run on Ubuntu, Windows, Mac and the rest of the distros can either use a snap package or compile from source. Sigh. Linux Mint does not like snaps, LMDE uses only flatpak’s.
SDRangel Flatpak
Now I’m not a big fan of flatpak’s either, to me they are in the same boat as snaps and docker images, unnecessarily slow, however after reading how to compile SDRangel from source, a flatpak was certainly the fastest and easiest way to let me try the software and see if I can get this working.
Thankfully I found SDRangel on Flathub. The following was all I had to do from a command line to install the flatpak, installation instructions were found here.
After a short time downloading and installing it was ready.
SDR plugable UDEV Rules
SDRAngel requires udev rules to be added for the most common SDR’s, since I also intend to try RTL-SDR’s at some point, now as as good as any time to install.
The udev rules can be found here on the SDRangel GitHub repo. I simply downloaded them in a zip file to my local downloads directory, unzipped and moved them into /etc/udev/rules.d. There is an installation script (install.sh) in that same directory as the downloaded udev rules you can use or read for inspiration on the linux commands necessary.
If you find that you still can’t access these devices, check your user has the right permissions to use USB or network devices, trap for young players and outside the scope of this post. Google and Duck-Duck-Go has lots to say on this topic.
Flatpak Permissions
Before starting SDRangel I also loaded Flatseal and checked what permissions the SDRangel flatpak was requesting. Always pays to review flatpaks using Flatseal, I’ve found a few packages that had some very odd permissions and didn’t work on LMDE out of the box.
It makes sense to me to grant SDRangel access to the network, PulseAudio sound server, GPU acceleration (if used), All devices (i.e. SDR’s) and the “Run in Background” option. This is the config that worked for me, YMMV.
SDRangel Configuration
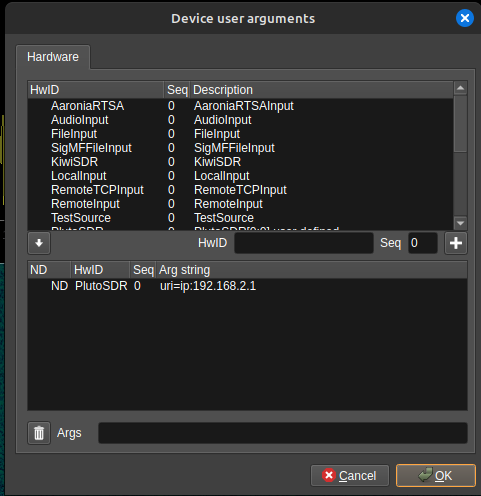
Once SDRangel is loaded, we’re greeted with a big blank screen. From here I added the ADLAM Pluto by clicking Preferences > Devices > User Arguments
I then added “PlutoSDR” in the HwID field, left seq as 0 and hit the ‘+” button which is the add symbol. I then selected the PlutoSDR entry in the lower pane, added “uri=ip:192.168.2.1” in the Args field, and hit OK. After I’d finished my config screen looked like this. Note my IP is the default PlutoDVB value, you can find what yours is set to in the config.txt file from the Pluto storage device it presents when connected to a PC. Now apparently you need to restart SDRangel for this to have any effect. YMMV.
Adding a RX Device
I then added an RX device by clicking on the menu button just to the right of the purple button with a play symbol in it. If you hover over each button, a pop up appears telling you what the button is. From the drop down box, I then selected the PlutoSDR entry which was right towards the bottom of the list.
Two screens appear, but we’ll concentrate on them one at a time. I configured the Receive window like this, more info here;
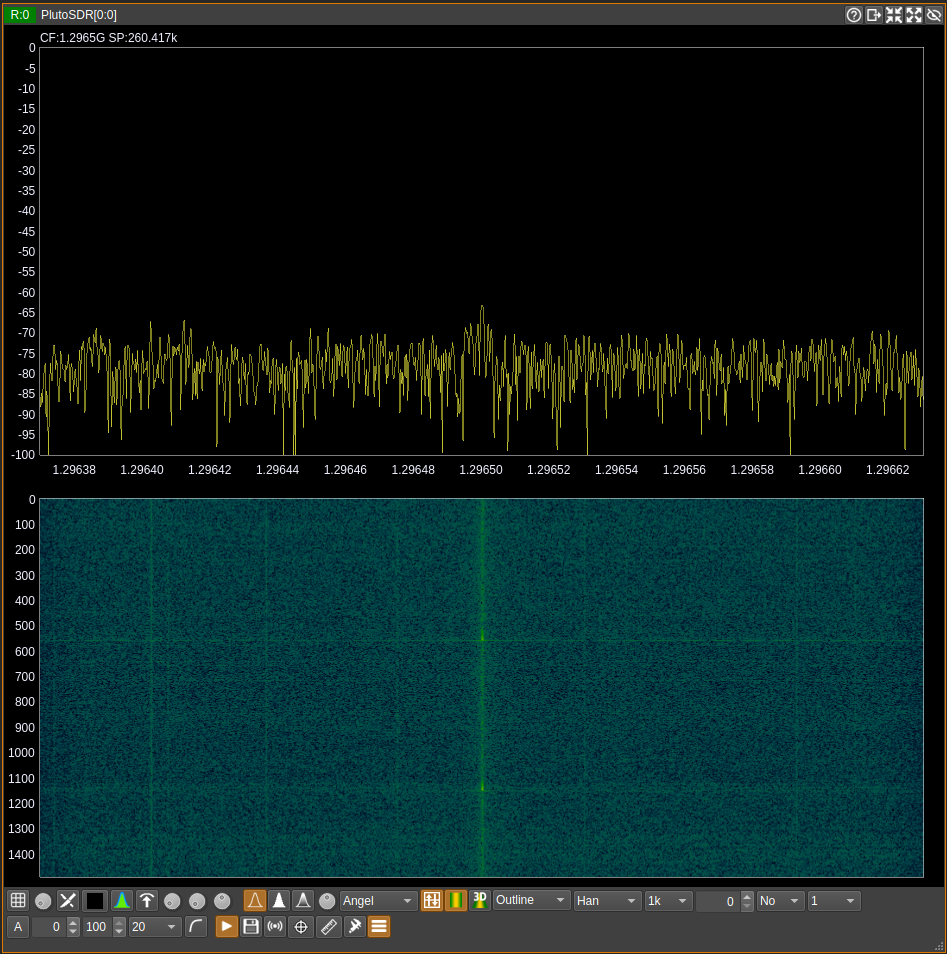
Now the thing to note. I’ve twiddled the sampling rate for reasons I’ll explain in another post. You should find the initial settings of 2.5MHz work well enough out of the box. I’ve increased the decimation from 1 to 8 in the S field, likewise I’ve selected “slow” AGC. If you then press the purple button with the white play symbol, you would see the next window start to do something interesting like this.
I didn’t change anything here, the out of the box config just worked for me. Now you might notice you don’t hear anything, that is because you have to add a channel/separate demodulator. On the receive window, just to the left of where “PlutoSDR[0:0]” appears is a button you can click to add a channel.
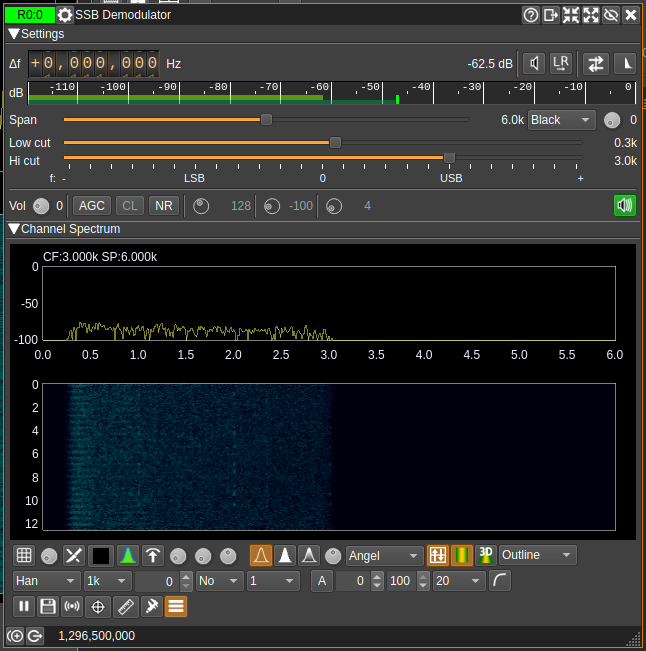
From the pull down box I’d choose the SSB Demodulator, which will appear on your screen. I configured it like this;
I had to play around with the sound settings, especially the audio settings which were hidden under the green speaker symbol (right click) on the right side of the screen just above the Channel Spectrum display. It is worth spending the time to read the documentation on the SDRangel website, once you realise that each part is a software plugin and how configurable this system is things get more interesting.
By the time we have the receiver configured, the spectrum display happening and a channel defined, audio should be appearing out of your speakers. If not then you’ll need to spend a bit more time debugging what’s happened with PulseAudio, mine just came to life.
I’ll also mention that if you try the Narrow Band FM channel plugin, there is a hidden squelch power threshold setting, that you need to wind down to -100 for it to open the squelch and produce white noise. It’s just to the right of “Sq” and a funny button with a triangle on it, you’ll see what I mean.
Adding a TX Device
I’m not going to reinvent the wheel here. I found a great article on the web and a video on YouTube from SignalsEverywhere that explained how to configure the ADLAM Pluto to transmit. You can find the original article from the RTL-SDR site here and the video embedded below;
Putting it all together
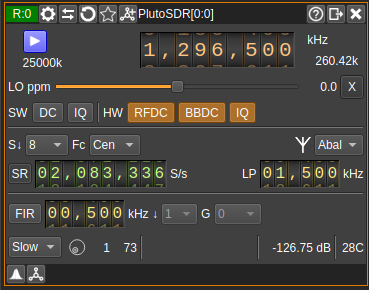
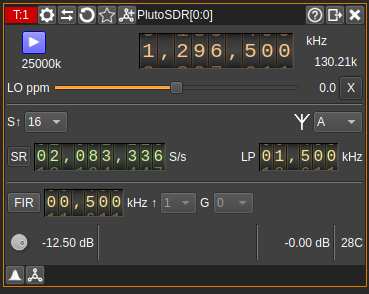
To prove that I could get this all working, I put the receiver on 1296.5MHz with the settings previously shown. I configured the transmitter slightly differently adding further decimation to reduce the effective bandwidth. You can see this below;
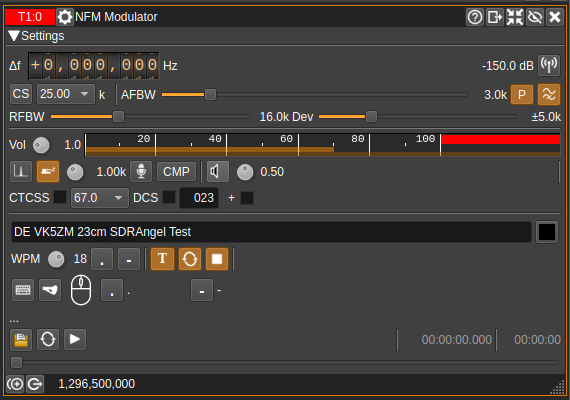
I then added a Narrow Band Modulator, by clicking the button just to the left of where “PlutoSDR[0:0]” appears in the menu bar (just like a channel button in a receive window) and selecting NFM Modulator from the drop down box. You then configure like so, based entirely on SignalsEverywhere’s YT video.
If you click on the purple button with the white triangle on the TX window, you should be greeted by CW being sent. Just so there was proof, I made and uploaded my own video.
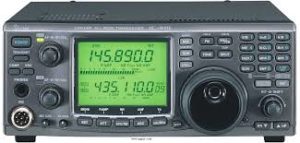
In the above video the audio is being demodulated by the Icom R10 on 1296.5MHz NBFM just so that there was a “Real Radio (TM)” involved. The ADLAM Pluto is transmitting approximately 0dBm into a dummy load. The ADLAM Pluto receiver is displaying the received signal and waterfall, I didn’t bother with a channel/demodulator to listen to my own transmission, the R10 was doing a good enough job on it’s own.
So now that I’ve got that working, I can start to experiment with the ADLAM Pluto and some microwave multipliers to get me up into the higher bands. I also need to check it will still key the Pluto Charon kit and modify as necessary. More to this story shortly.
So recently I upgraded my computer to something more modern. Jumping seven or so I7 generations has brought my personal development machine from the mid-naughties back to relatively recent hardware. This time I’ve gone for a second hand one owner Dell Precision SFF desktop, which sat on my desk at work for the past 4 years, which was duly purchased when the lease expired.
Microsoft however with all their AI shenanigans incentivised me to make the switch to a Linux desktop permanently. So it was goodbye Windows 10 and hello Linux Mint, more specifically LMDE. I’m no stranger to Linux, having built and maintained Linux systems since the 90’s, but as a desktop, well that is all new.
I chose LMDE in preference to standard Linux Mint after a few arguments with the later versions of Ubuntu and their slow evolution towards snaps, which kept robbing my old laptop hardware of resources. I switched to Linux on my laptop more than six years ago and it’s been great.
For quite a few years I’ve been using and given priority to Open Source apps for my Electronics and Radio development and I was really down to one or two Windows only apps when I switched. Nothing a Virtual Machine booting windows couldn’t solve using Oracle VirtualBox, especially on this machine with newer hardware and enough RAM.
So far I’m impressed with LMDE as nearly everything has worked out of the box, including printing. So much easier than Slackware compiling everything from source back in the day. I was however caught out by secure boot and VirtualBox, which lead to learning’s on the DKMS driver signing mechanisms, which ultimately saved me from NVIDIA Driver horrors; which is the subject of another post I must get around to soon.
It’s now been more than three months since I’ve switched and I’ve not needed to switch back, on-wards and up-wards !
In my last post on the Pluto External PTT I had done some preliminary testing of the external PTT output using a multi-meter before wiring it to the Pluto Charon and confirming it worked. It was at this point things took a jump to the left and then a step to the right…
What I noticed is I would hit the TX button in SDR-Console and there would be a pause, one, two, three, then click would go the transmit receive (TRX) relay. Hmm that’s not going to do, a 3s delay between the PC software PTT and the Pluto Charon external amplifier ain’t going to work on FM/SSB.
However if I hit the TX button in SDR-Console again the TRX relay would click and go off without any delay. Now that was strange and the asymmetric nature of operation required further investigation.
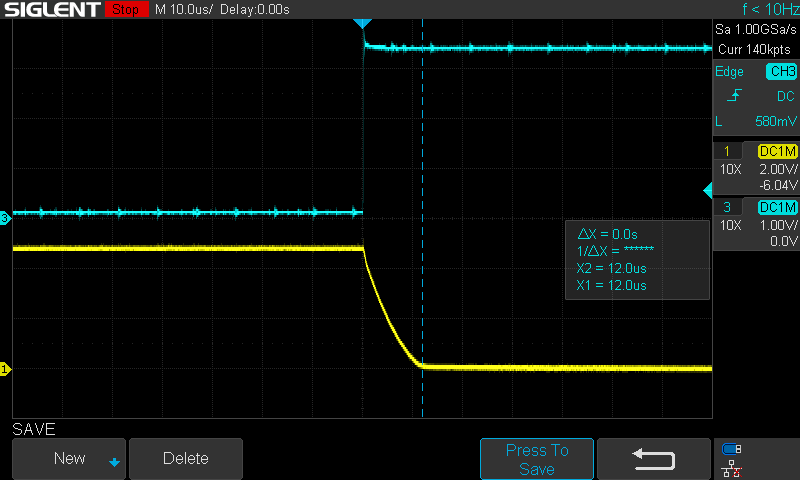
The first step was to rule out the hardware, so with a C.R.O on the Pluto Charon PTT line (connector A1) and another on the ADALM Pluto GPO0 pin (yellow and cyan respectively) we can check that the switching is nice and clean.
Nope nothing to see here, you can see the transistor on the Pluto Charon PTT board pulling the PTT line low and hitting zero volts in no more than 12us. Problem has to be elsewhere.
So now were into firmware and software territory, sigh this is going to be one of those rabbit holes.
I firstly tried the “for the brave” firmware that can be found on the Mini-kits support website, which is an early version of the PlutoDVB firmware. This changed the behavior entirely and there was a delay of 1-1.5s each time the external PTT changed state from ON to OFF. Not what I wanted, but better and perhaps more usable than the 3s ON and instant OFF I was seeing on the PlutoDVB revision 3.0.3 firmware + Rev C/D patch.
Further reading from the analog devices website suggested that the GPO pin connected my external PTT module could be controlled by some ENSM module within the AD9361-phy linux driver, so I tried some experiments with SDR-Console and the Analog Devices stock v0.38 firmware, that didn’t work either. It was clear that SDR-Console was not using this IIO method to switch the Pluto in to TX or RX.
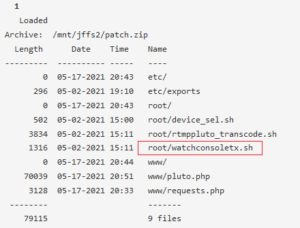
So I revisited the latest PlutoDVB firmware (perseverance 3.0.3 + Rev C/D patch) once again reading and watching more closely this time.
It was while applying the patch I saw something interesting, I’ve highlighted it in red adjacent. I wonder what that script does ?
The whole reason the patch was required in PlutoDVB Perseverance 3.0.3 firmware was to get the PTT working with revision C & D hardware. I wonder if that is where I start ?
So let me log into the Pluto and take a peek at the script.
#!/bin/sh
#https://www.analog.com/media/cn/technical-documentation/user-guides/AD9364_Register_Map_Reference_Manual_UG-672.pdf
source /root/device_sel.sh
ptton()
{
#PTT on GPIO 0 AND GPIO 2 (GPIO 1 should be not touched)
echo 0x27 0x50 > /sys/kernel/debug/iio/iio:device$dev/direct_reg_access
mosquitto_pub -t plutodvb/status/tx -m true
}
pttoff()
{
echo 0x27 0x00 > /sys/kernel/debug/iio/iio:device$dev/direct_reg_access
mosquitto_pub -t plutodvb/status/tx -m false
}
echo manual_tx_quad > /sys/bus/iio/devices/iio:device$dev/calib_mode
#Manual GPIO
echo 0x26 0x10 > /sys/kernel/debug/iio/iio:device$dev/direct_reg_access
pttoff
while :
do
inotifywait -e modify /sys/bus/iio/devices/iio\:device$dev/out_voltage0_hardwaregain
gain=$(cat /sys/bus/iio/devices/iio:device$dev/out_voltage0_hardwaregain)
if [ "$gain" = "-40.000000 dB" ] ; then
echo "SdrConsole PTT OFF"
pttoff
else
if [ "$gain" = "0.000000 dB" ] ; then
sleep 2
gain=$(cat /sys/bus/iio/devices/iio:device$dev/out_voltage0_hardwaregain)
if [ "$gain" = "0.000000 dB" ] ; then
echo "SdrConsole Power Max PTT ON"
ptton
fi
else
echo "SdrConsole PTT ON"
ptton
fi
fi
done
So reading my way through this script by the time I hit line 24 I had confirmed
SDR-Console does not use the ENSM module within the Pluto ad9361-phy driver
Instead the script uses the sysfs subsystem to read different values from the IIO driver
SDR-Console varies the TX gain within the IIO driver between two limits that the script interprets and drives the relevant GPO pin
In an attempt to prevent a race condition, line 31 introduces a 2s sleep function between successive reads of the gain value
Guess where the 3s delay I’ve been searching for comes from !?!
So a quick bit of hacking on this script, changing line 31 to read “sleep 0.1” or 100ms, then restarting the “watchconsoletx.sh” process increased the speed of the external PTT to the point where the delay between SDR-Console and the TRX relay on the Pluto Charon activating is nearly imperceptible. I’m not sure if using a fraction of one second is valid in this shell, it may have been ignoring it, but it proved my point.
However what I’ve done to this script and the way in which SDR-Console works I’m not convinced will work 100% of the time. The other problem is any changes that are made to these script files are not permanent they are only kept in RAM, so as soon as you reboot they revert to those stored in volatile memory (flash).
So it looks like I may have to reverse engineer the “pluto.frm” file and see if I can hack together a better script to make this work how I want. At least I now know where the 3s delay has come from and that there are possibilities to fix it.
That however will have to wait until the next post.
The next step in the process of using the ADALM Pluto is sorting out a press-to-talk output to drive the Pluto Charon. In this instance I’ve followed the tried and trodden path of adding a small transistor output to one of the GPIO pins and updating the firmware. There are some interesting articles on the ADI website that discuss how to do this via the FPGA, but I decided to learn to walk before I ran.
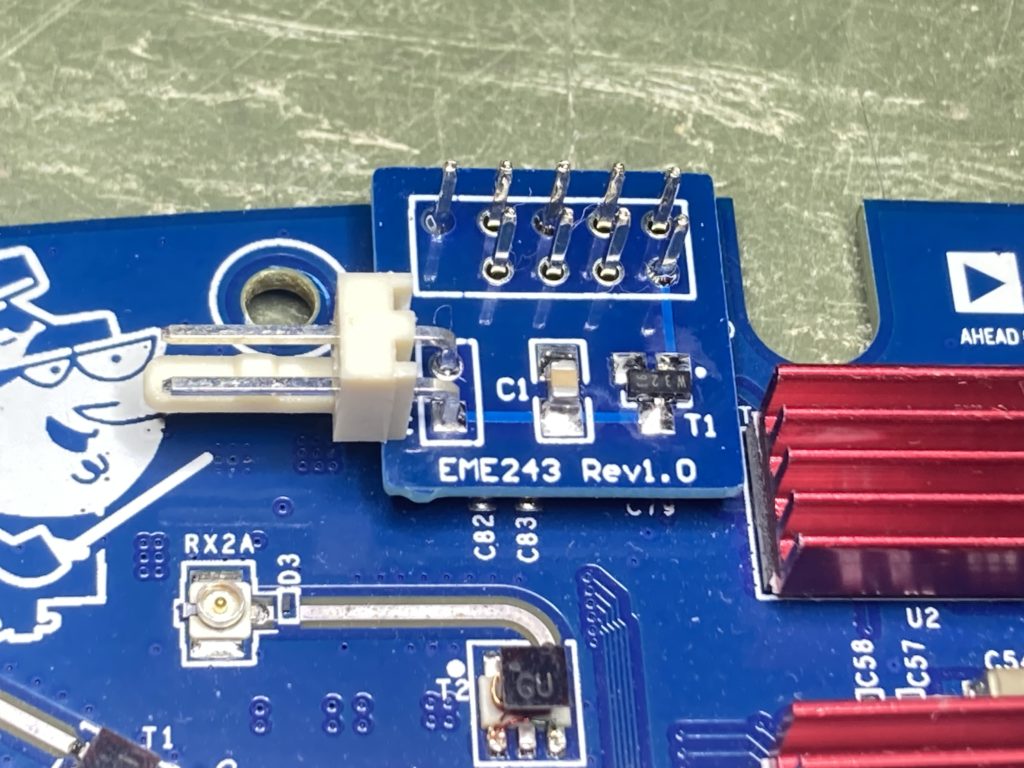
When I ordered my Pluto Charon kit I also purchased the separate PTT module which you can see here (click). This is very easy to install, just make sure you observe good ESD practices when you remove the Pluto from it’s case and handle it on the bench.
Here’s the photo’s of how I installed mine.
I decided to use a small two pin right angle KK 0.254″ molex connector for the PTT output, as I’d like the capability of unplugging Pluto and Charon boards for service/changes/updates etc.
Now for the hairy scary part of the process. On the Mini-kits website is a URL to some custom firmware written by Evariste F5OEO that can enable a PTT function on a GPIO pin. I was at first a little alarmed by the comment “for the brave”, but it turns out this firmware is part of the PlutoDVB project. You can find later software from 2022 on Christian F5UII’s website (click) and you’ll see some comments about fixing the PTT on the Pluto Rev D boards to work with the latest versions of SDR-Console. I have a Pluto Rev C, which is the same as the Pluto Rev D, so I had no choice but to use this newer firmware and work out what to download.
So after reading most of Christians Website I discovered I had to do two things. Firstly I had to swap from the official ADI Pluto v0.38 firmware to the custom PlutoDVB 3.0.3 firmware. Secondly patch the 3.0.3 firmware to account for the Rev D hardware. This wasn’t obvious where to start.
Below is a summary of the steps I used to swap the firmware.
Connected the Pluto to my PC, checked it had presented a removable drive
Download the firmware from Christian F5UII”s website, I used the PlutoDVB perseverance firmware 0303 (26.6M)
Extracted the pluto.frm from the downloaded zip and stored it on the Pluto removable drive created on my PC (don’t get confused or alarmed by the file name “patch.zip” as this is indeed the entire firmware)
Ejected the Pluto and waited for it to finish doing the upgrade and reboot, once done it reconnected to the PC
Used a web-browser to point to http://192.168.2.1/index.html, confirmed it presented the “Lets go to PlutoDVB” welcome screen, not the ADI reference material.
Then clicked on the “Lets go to PlutoDVB (USB connection)” button which launched into the system setup.php page
From the menu across the top, selected “System ” then “Maintenance” where I found the patching and upgrading firmware mechanism.
For my hardware (Rev C/D) I needed to download and apply the “Patch for PlutoSDR Rev. D hardware”
Applied the patch, saw that within the “Delete Patch” window the updated files were displayed once done
Success !
Now I could configure the PlutoDVB firmware to do what I wanted, which in my case was to use SDR-Console. So from the “system” menu at the top I clicked on the “Pass-through” option and hit apply. That should be all I needed to complete.
There is an error message displayed across the top of the screen about a datv text file not being present. If you enter your call-sign in the respective field on the setup page and your name in the DVB provider field, hit “apply settings” and this will create the right file and the error message disappears.
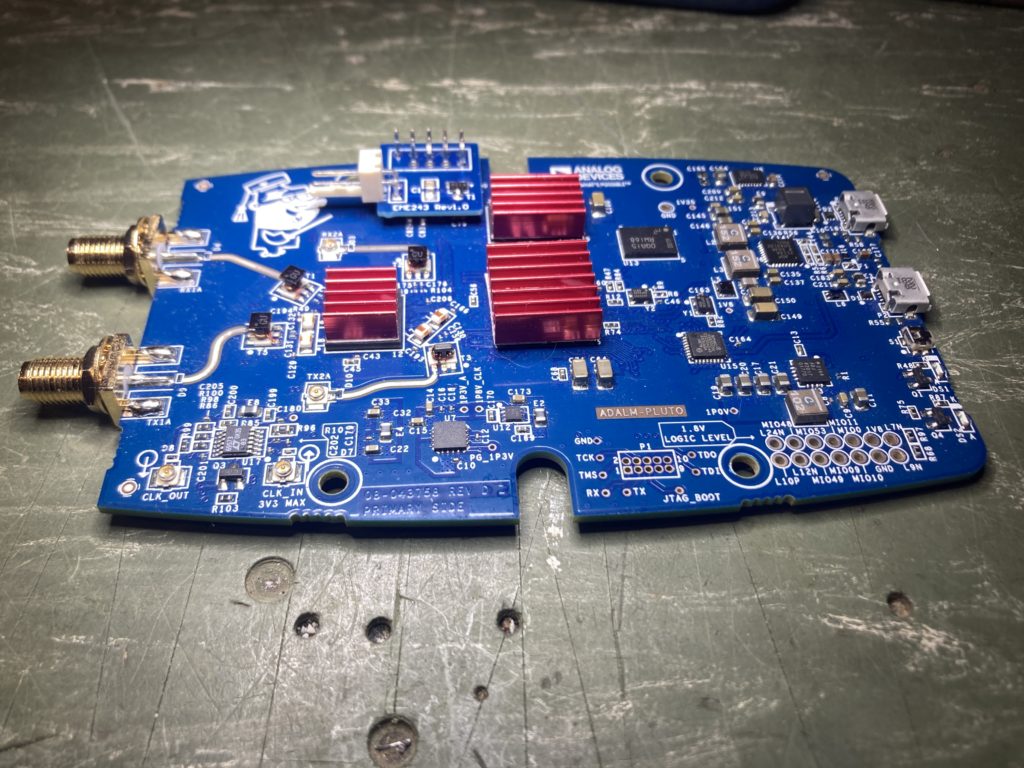
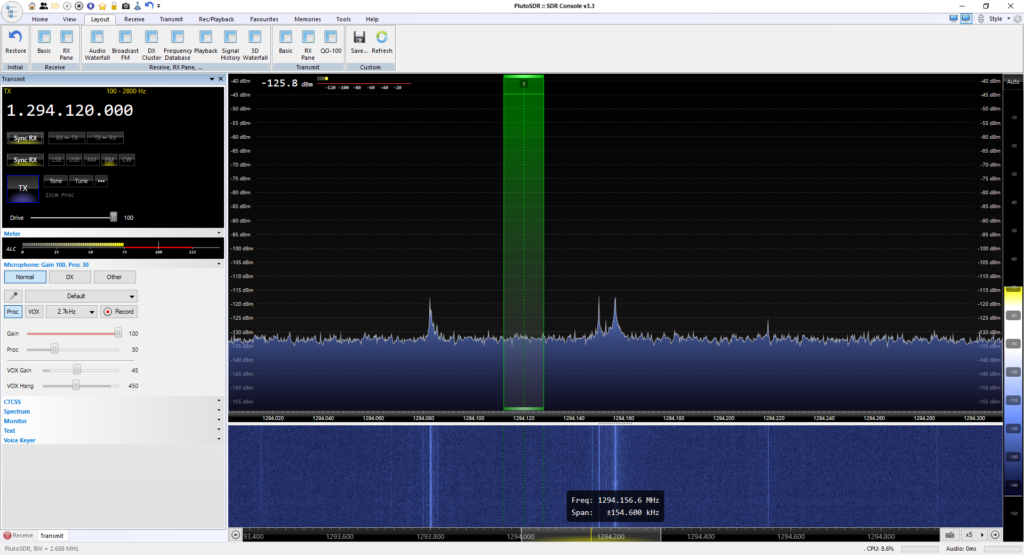
Once all of this was done, I was able to setup and configure SDR-Console and test that the PTT worked with a multi-meter. Below you can see SDR-Console listening on 23cm ready for me to hit the TX button. The Pluto is sitting right up against the PC, so I’m not surprised there are some birdies in the shack, I’ll only panic once the Pluto and Charon and boxed up together.
For my next trick I intend to hook this up to my CRO and see how long before or after the PTT line is asserted does RF appear at the transmit port. However that will have to wait for the next post.
For the past couple of weeks I’ve been giving some thought as to how I’d box up the Mini-kits Pluto Charon. As with any problem the first step it to work out how I want to use it.
I’d like to be able to use the Pluto Charon both in the field and in the ham shack. The ADLAM Pluto connects to a PC via a micro USB and presents itself as a USB Ethernet device.
Further reading suggests that the ADLAM Pluto USB OTG port can host an external USB-Ethernet adapter or USB-WiFi adapter, making it possible to un-tether the Pluto from a PC or use standard IT infrastructure. In my situation an external Ethernet port is of interest, since I could easily build all of the Mini-Kits Pluto boards into their own enclosure and simply network them together and into the same PC without having to count on multiple USB ports. This again fits with my field and shack mode of operation.
The output power of the Mini-kits Pluto Charon, Pluto Styx and proposed Pluto Nix kit is in the region of one to two watts. This is more than enough transmit power to jump from hilltop to hilltop over quite a path with some antenna gain and short cables. If however you want to lift the antennas up to the top of mast, external in-line amplifiers up behind the antennas would be required to keep losses under control. If the external amplifiers also included a separate mast head amplifier, then losses of up to 6-8dB at any of these microwave frequencies could be accommodated without significantly impacting performance. I’ll be exploring this further once the first Pluto Charon kit is completed.
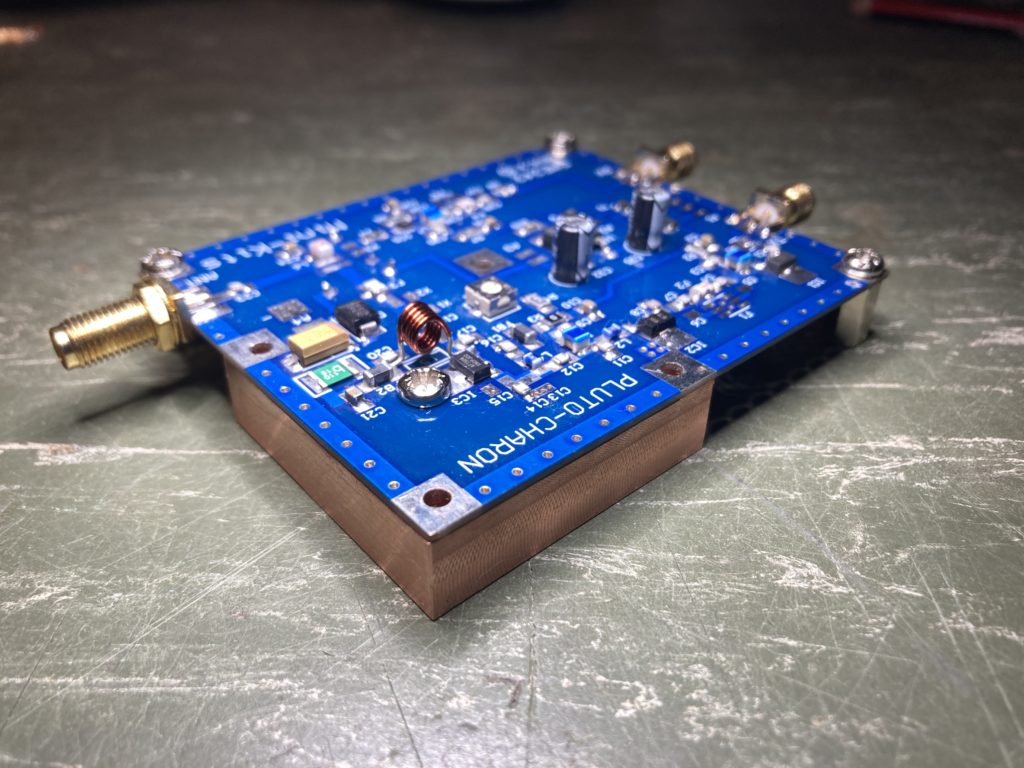
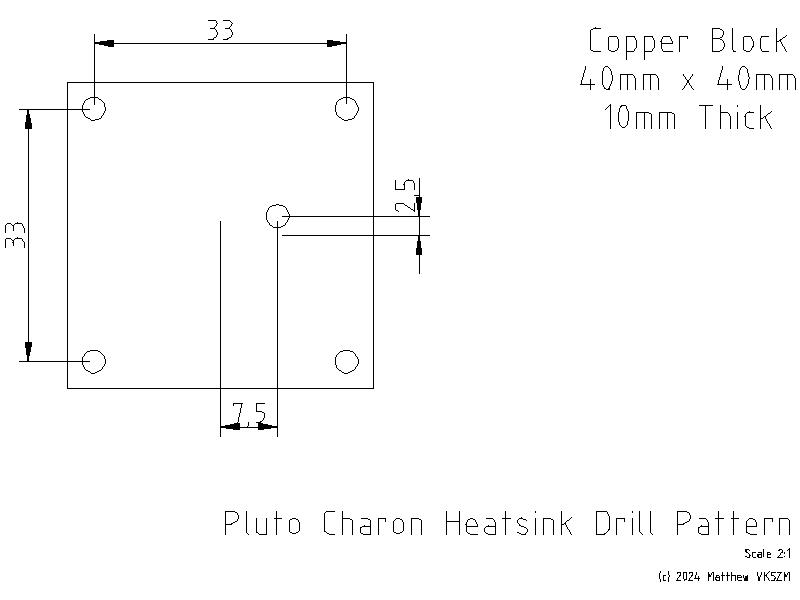
So, the first step of course is to get the Pluto Charon kit operational, to do that I needed to test it. The kit came with a small 40x40mm heatsink that I could attach to dissipate the heat from the final amplifier IC1. I mulled this over for a while before deciding I’d prefer to put a much larger heatsink on the top of a die cast box and mount the Pluto Charon to that. A good example of what I’m thinking is how I built my Rubidium reference (here). My main reasoning is I’d like to stabilise the heat within the die cast box so the Pluto does not need to work so hard on keeping the frequency stable. Did I mention the Rubidium reference, one would say this started these shenanigans.
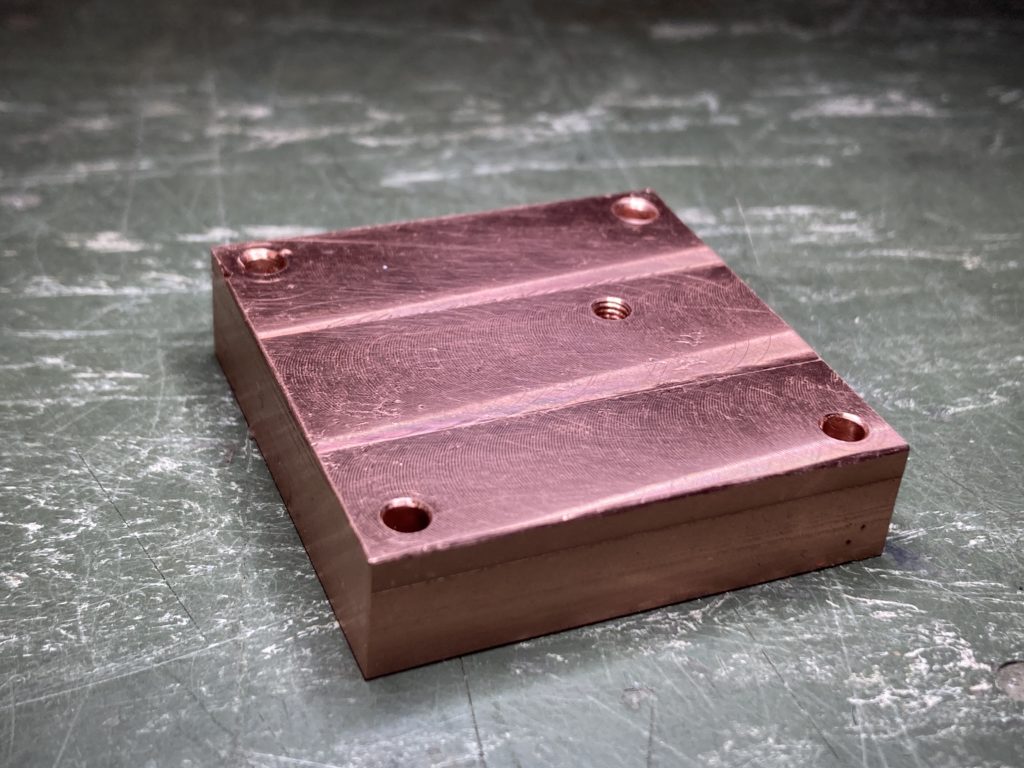
To get the heat out of the Pluto Charon final amplifier the layout dictated a small copper block to be made. There are components on the top and bottom of this board, so one needs to pay attention to clearances etc. So it was off to see a good friend with a lathe ;thanks Peter it was a fun afternoon and some good machining Zen !
Tappy tap tap !Finished Copper BlockInstalled
It is no coincidence that the copper block is 10mm thick, this is perfect for three 10mm hexagonal spacers to be placed under the remaining three sides of the PCB for support.
The hole in the middle of the copper block is what transfers the heat from IC1, so this was tapped to accept a M3 hole. The PCB had a plated 2.5mm hole and was reamed out slightly to accept the larger M3 screw. The M3 screw used was tin plated copper, not tin plated steel/stainless which is a poor conductor of heat.
The remaining four holes in the PCB that hold the heatsink were left M2.5 and the holes through the copper block drilled 3mm for clearance. When this is attached to the heatsink, four M2.5 x16mm screws through these holes in the heatsink, washers and split washers will be used to sandwich the assembly and keep everything held tight.
So I don’t forget and for anyone following along at home I’ve included the drill pattern. This was the only information conspicuously absent from the assembly instructions. This drawing is drawn from the top of the PCB looking down. The hole in the middle of the heatsink is referenced from the center of the copper block. For some reason I can’t get LibreCAD to show a mark for the origin yet. I hate having to measure PCB’s to get hole locations, a combination of transfer punches, vernier calipers and gauge pins were used to establish and check that these locations were close enough.
Now it’s time to carry on with the Testing and Alignment of the Pluto Charon !
For quite some time I’ve been promising my eldest son his own bedroom. However like everything, this is somewhat complicated and has taken far longer than expected. To make this happen, I’ve had to make more shelving in the shed, move stuff stored in the garage out into the shed, clean out the garage and move my office, which was in the 3rd bedroom of the house out into the garage soon to become my new man-cave. I’ve felt like I’ve been playing musical chairs with storage boxes for quite some time. Then there is the time required to renovate said 3rd bedroom back into a teenagers retreat, so much work, so many weekends, I still hate painting.
However, while moving things out of the office and into the new man-cave I rediscovered the Pluto Charon kit, languishing in a forgotten project box. My original plan was to use this kit as my 23cm home station, however during the above renovations a member of my radio club offered me a pristine Icom IC-910H with 23cm module which I couldn’t refuse. Needless to say the Pluto Charon priority and urgency was pushed back somewhat.
Fast forward two years and having rediscovering this kit, along with seeing the new 12cm Pluto Styx kit available (click) and a teaser for the 6cm Pluto Nix, well it was time to finish it and continue working my way up through the microwave bands.
This kit requires the usual SMD microwave construction techniques, so fine solder a good iron, a steady hand and optical magnification is an absolute must. The Mini-kits instructions and support page are as usual first class. However one should heed the warning on the website ordering page that “this kit is not for beginners and requires very experienced soldering skills”.
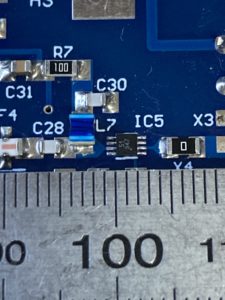
I generally found the majority of the kit straightforward, until I got to IC5 which is a BGU8051 preamp from NXP. You should check out it’s specs on the NXP website. This is one of those “looks big on the computer screen” kind of parts that even designers get caught out with when ordering their first samples. I’ve included a photo, along with a strategically placed steel ruler for scale. That IC is tiny… really tiny !!!
At just two by two by three-quarters of a millimeter with eight pins, it was clear that this was not going to be soldered by any ordinary soldering iron. Thankfully I have a hot-air rework station, so I manually pasted the board with an I-Extruder, used plenty of flux and re-flow soldered the device to the board. Since inductor L7, capacitor C30 and resistor X3 were so close, I chose to leave these off until I had soldered IC5 to give me room and ensure the hot air did not cause unnecessary stress to adjacent components, YMMV. I also typically use a T3 solder paste for the majority of my kit building, but for this board I resorted to using T4 since you could nearly count the number of solder balls dispensed onto each pad of IC5. However I’m happy with the result and with the right tools this kit can be assembled at home. There are many YouTube tutorials on how to solder with hot-air worth watching as well.
Once I had the kit soldered together I then turned my attention to how I was going to put it in a box and begin to test it. However that is for the next post !
I’ve been running TrueNAS (previously FreeNAS) at home for more than 10 years on various grades of “least expensive” HP Server hardware. I’ve been impressed from the very beginning. With two young boys data has been accumulating at a fast rate for a number of years and my most recent HP ML10V2 server had simply run out of storage space. So when my file server started throwing SMART errors, telling me one of the drives was on the way out it was time to hurry up with that planned upgrade.
I won’t bore anyone with the details suffice to say, it was going to go from a three drive Raid-Z1 array to *at least* a Six drive Raid-Z2 array, increasing storage from 6TiB to a whopping 16TiB and doubling the number of active spindles. That should give us all plenty of time to grow our “media” library somewhat and replace drives as necessary upgrading the pool as we go.
However before I made this jump I needed to get the HP H220 Raid Card re-flashed and reconfigured for a life outside its traditional RAID setup. After a little research on the interwebs it turns out the HP H220 that I’d bought was a rebadged LSI/Avago/Broadcom SAS9207-8 controller with custom firmware. It pays to cruise the interwebs (especially Serve The Home forums) and find out about your cards chipset, since there are two known versions of the HP H220 card in circulation and they use different chipsets, which can be bothersome.
Now these Storage cards are “intelligent” and come configured for SAS/SATA RAID systems in what’s called IR mode. For TrueNAS we need to the card in a more traditional IT or JBOD mode where TrueNAS can see and control the disks each individually. It does seem odd that we take these high-spec cards and dumb them down, but keep in mind the two SFF-8087 connectors on the card can drive up to four SATA drives at 6Gbps without flinching, with all eight channels singing it will bring the I/O load up on any PCI-E 2.0 bus . For less than A$65 at the time of writing this is still good value.
So just how does one re-flash the firmware on these LSI 9207-8 cards without bricking them ? Well it turns out these cards are hard to brick, the software has a number of checks to prevent silly mistakes, so they are not as fragile as many would fear.
However there are some tricks that I learnt which I thought I’d share, note this is not a how to guide just a collection of my notes I made as I went;
The DOS version of the SAS2FLSH utility is what we want to use, it will allow the upgrade or downgrade of firmware and card bios, the UEFI, Windows and linux varieties are not so nice, there is a technical article (ID: 1211161501344) that you can read all about it (YMMV).
You can download (at the time of writing) all of the firmware for these cards from the Broadcom website. The webpage is not intuitive, start in the Support and Services / Support documents and downloads page, search using “Legacy Products” and “All legacy products” then 9207-8, perservere there are there and can be found; don’t forget to read and accept the Broadcom license agreements.
You will need the P20, P19 and the P14 firmware with IT, IR, BIOS for MSDOS, they are 1.7MB zip files.
You can then make yourself a FreeDOS boot disk using Rufus
Copy the P20 firmware (9207-8.bin), P19 bios (mptsas2.rom) and P14 sas2flsh.exe utility to the DOS boot disk, and you’re done.
The P14 SAS2FLSH utility does not balk at the card being branded HPE when it’s expecting to see LSI, later versions of SAS2FLSH (P19/P20) do this check and will refuse to update. Note that once you write the LSI bios you’ll need to find the original HP bios ROM on the interwebs if you want to go back, there didn’t appear to be any “save” current bios options… caveat emptor
The P20 bios ROM will “red screen of death” on some HPE server machines, my ML10V2 was no exception; I simply downgraded the bios to P19 which was 6 months older than my HP bios (J10) version and worked.
Once flashed, reboot the machine and enter the controller configuration and setup the card the way you need, hint it helps to specify which card/drive you will boot from, might save you a few unnecessary reboots to find out why it’s not working… sigh
Anyway I’ve made this post to firstly remind me what I’ve done if and when I need to repeat this exercise in the future, it may also be helpful to someone that is trying to update the card and is having trouble. These cards are difficult (not impossible) to brick, but the above certainly worked for me on my hardware, as always YMMV.
It is no secret that Motorola CPS software does not like to run on modern operating systems. I still have a number of UHF Motorola MTS2000 handhelds which once given new batteries have proven themselves useful time and time again.
However my trusty old Windows XP laptop, with a real serial port fried its motherboard recently never to boot again. My immediate thought was “yikes what do I use now to program these Motorola radios” ?
So rather than go looking for further ancient hardware I started experimenting if Motorola CPS would run on a Windows 10 64-bit platform. I’ll spare you the gory details, but no amount of compatibility mode twiddling or research would result in a working system. There is something fundamental in the RS232 32-bit sub-system within the CPS software that prevents this from ever working. I could not get the CPS software to “read device” instead receiving a timeout. Grrrr….
So the only alternative was to experiment with an older version of Windows in a virtual machine and passing through a serial port. I remember when Windows 7 was first released Microsoft released a version of Windows XP that would run within Microsoft Virtual PC. The Motorola CPS software is from around the same time, so it was an ideal candidate to try. Turns out this was easier than I expected.
Setup Windows XP Virtual Machine
I found the following setup guide very useful from Help Desk Geek website (click). The download link from the Microsoft site has disappeared, but the alternative link from the CNET site was working at the time of this post.
I followed this guide closely, there are a few steps you needed to pay attention too but otherwise this went smoothly. I’m currently using a Windows 10 host and the only trouble I had was with the mouse, where I could not control the mouse within the Guest correctly, but you can temporarily disable the VirtualBox “mouse integration” feature to get around this until the VirtualBox Guest Additions are installed. Once the Guest additions were installed, everything worked as expected.
Activating Windows XP in 2022
The next challenge is since Windows XP support ended there is no way to “activate” this vanilla of windows any more which is right painful. One work around is to snapshot the VM and rollback each time you wish to use it, I wasn’t a fan. So thankfully the “Roger Webb” YouTube channel had a video that shows how to work around this problem, don’t forget to leave a like.
Serial Port Pass Through
Now I’m lucky that my Gen-3 I7 desktop machine has a real serial port on the motherboard. This was one of the very last Intel made motherboards with the legacy IO chipset, so not only do I have a serial port it has a parallel port too.
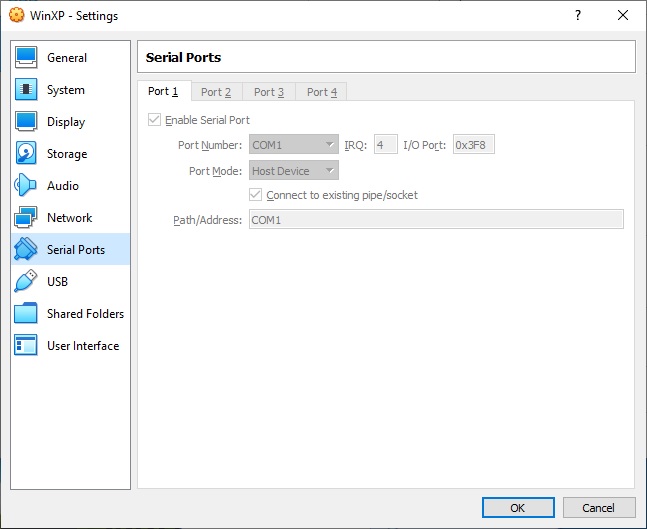
To allow Windows XP access to the host serial port, one just needs to configure the hardware pass through. Within the VirtualBox settings there is a separate “Serial Port” tab that simply requires mapping between the guest and host systems.
As you can see I’ve simply mapped COM1 on the guest to COM1 on the host, simples !
Copying Motorola CPS into Windows XP
So for the grand finale we can install the Motorola CPS software within Windows XP. How one gets the software installed can be done a few different ways.
I decided to use the VirtualBox shared folders mechanism. With the guest additions installed I found once I’d configured the shared folders they were automatically mapped as a network drive the next time I restarted the Windows XP guest. It was a simple matter to then double click the executable and install.
There were a few websites with rough instructions, but I found after watching the following YouTube video from Peter Downie I was able to get it working in short order;
The other method I’ve used to pass software through to a guest is to use a USB thumb drive. Copy the files from the host to the USB, pass the USB through to the guest, move the files and eject to pass it back. Both methods work just as well as each other.
The Proof is in the Pudding
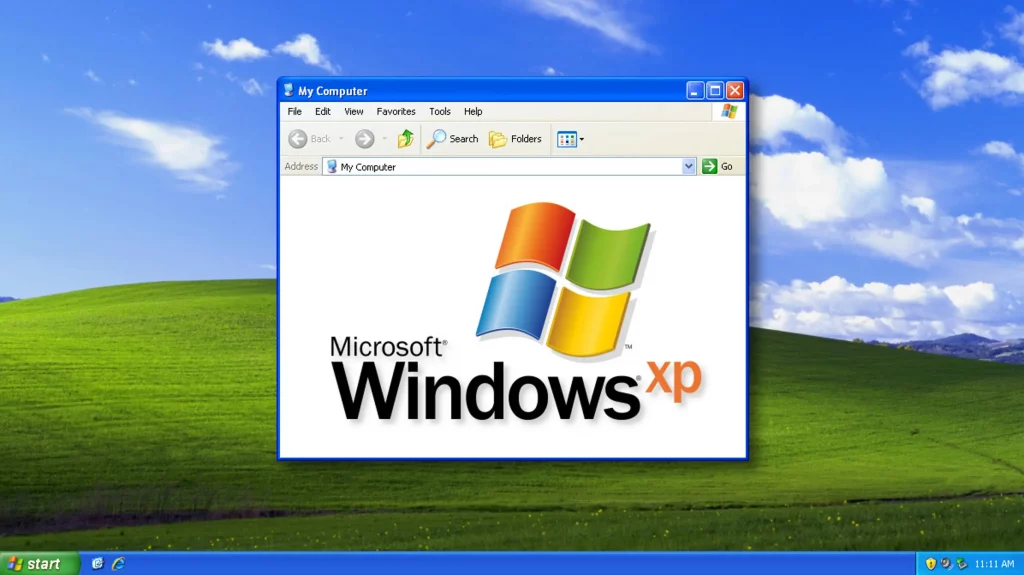
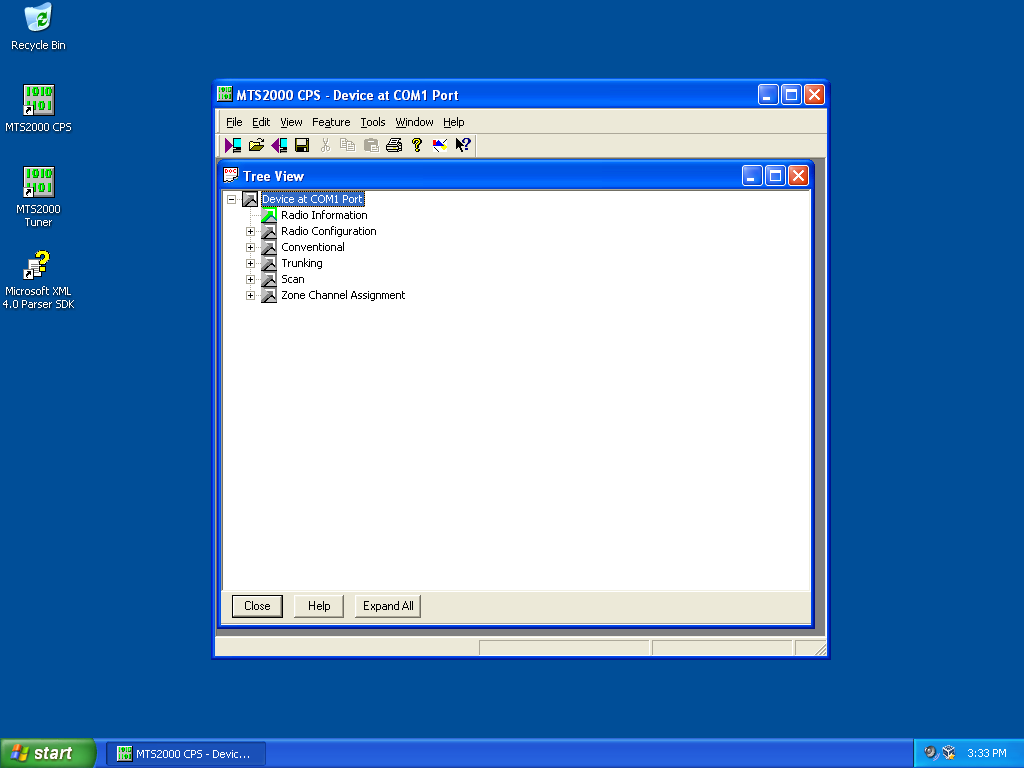
So once you can copy the relevant files into the VM, then it’s a simple matter to install and run the Motorola CPS software. Then simply configure it to talk to the serial port you’ve passed through which is COM1 in my case, then try to read a physical radio. Please note that Motorola CPS software is licensed and cost real $$$ to purchase, please do not request copies of said software fro me as refusal often offends.
You will know you’ve got it right when you hear the radio beep, it says PRGM on the radio display and you are greeted with the contents of your code plug.
I was certainly relieved to be greeted with the screen shown above, make my changes and write the config back to the radio. I’m once again in business. I hope that other users of older Motorola CPS software find this useful.